
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(571 шт. продукции доступно)






















 Готово к отправке
Готово к отправке









































 Готово к отправке
Готово к отправке













































































 Готово к отправке
Готово к отправке




 Готово к отправке
Готово к отправке















 Готово к отправке
Готово к отправке











 Готово к отправке
Готово к отправке





























При создании робота с использованием сервомотора Arduino, управляемого сервоприводом, существует множество различных типов сервоприводов на выбор. Выбор соответствующего типа зависит от конкретного применения и желаемого уровня управления. Вот краткое описание некоторых распространенных типов:
Стандартные сервоприводы
Это наиболее распространенный тип. Они имеют диапазон движения 180 градусов. Они управляются путем изменения ширины импульса сигнала, посылаемого от Arduino. Стандартные сервоприводы часто используются в приложениях, требующих позиционирования рук, ног или других частей игрушки. Они используются в радиоуправляемых автомобилях для управления рулевым управлением или в роботах, движущихся по линии, для управления колесами. Это связано с простотой их использования. Они доступны по цене и обеспечивают надежное позиционирование в пределах своего диапазона движения. Однако они не обеспечивают непрерывного вращения или точного позиционирования за пределами своего диапазона.
Сервоприводы непрерывного вращения
Эти типы сервоприводов обеспечивают непрерывное движение на 360 градусов. Они управляются путем изменения напряжения, посылаемого от Arduino. Сервоприводы непрерывного вращения идеально подходят для таких применений, как колеса робота или движущиеся части, требующие непрерывного движения. Они используются в роботах для управления движением вперед и назад или в автоматизированном оборудовании для привода конвейерных лент. В отличие от стандартных сервоприводов, они не обеспечивают точного позиционирования. Вместо этого они предлагают управление скоростью для непрерывного движения. Однако они могут не подходить для задач, требующих точного позиционирования или остановки под определенными углами.
Цифровые сервоприводы
Эти типы сервоприводов имеют цифровую схему и микропроцессор. Они используются для повышения точности, скорости и производительности. Цифровые сервоприводы обеспечивают лучшее удержание положения, более быстрое время отклика и более точное управление, чем аналоговые сервоприводы. Они используются в высокопроизводительных приложениях, требующих точности, например, в дронах, роботах и радиоуправляемых машинах. Они предлагают лучшую производительность с точки зрения точности, скорости и крутящего момента. Однако они дороже аналоговых сервоприводов.
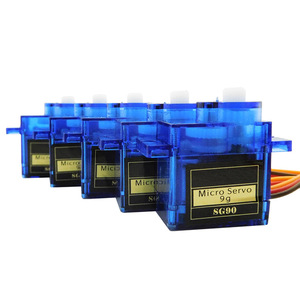
Мини-сервоприводы
Эти типы сервоприводов меньше по размеру. Они обеспечивают меньший крутящий момент, но полезны для применений, где пространство ограничено. Мини-сервоприводы используются в небольших роботах, компактных машинах или моделях с ограниченным пространством для компонентов. Они просты в управлении, легкие и могут помещаться в небольших пространствах. Однако по сравнению со стандартными или более крупными сервоприводами, они имеют ограниченный крутящий момент и диапазон движения.
Требования к крутящему моменту
Для выбора сервомотора необходимо знать крутящий момент, необходимый для перемещения нагрузки. Он зависит от веса нагрузки и расстояния от нее до плеча сервопривода. Для более тяжелых нагрузок или более длинных плеч требуется сервопривод с высоким крутящим моментом. И наоборот, для более легких нагрузок или более коротких плеч достаточно сервопривода с меньшим крутящим моментом. Это гарантирует, что сервомотор будет достаточным для перемещения нагрузки без перегрузки.
Тип сервопривода
Существует три типа сервомоторов: стандартные, непрерывного вращения и многооборотные. Сервоприводы непрерывного вращения предназначены для вращения колес или перемещения деталей по прямой линии. Многооборотные сервоприводы предназначены для применений, требующих более одного полного оборота. Тип, который необходимо использовать, определяется приложением.
Скорость
Скорость - это время, затрачиваемое на поворот на заданный угол. Высокоскоростной сервопривод предназначен для применений, требующих быстрых движений. И наоборот, низкоскоростной сервопривод предназначен для задач, требующих большей точности.
Напряжение
Номинальное напряжение сервопривода должно соответствовать напряжению источника питания. Это гарантирует эффективную работу сервопривода и предотвращает его повреждение.
Метод управления
Широтно-импульсная модуляция (ШИМ) - это метод, используемый для управления большинством сервоприводов. Ширина импульса, посылаемого, определяет положение сервопривода. Некоторые сервоприводы используют I2C или последовательное управление для более точных движений.
Монтаж и интеграция
Конструкция проекта определяет, как сервопривод монтируется и интегрируется. Сюда входят кронштейны, шестерни и другие компоненты. Сервопривод должен легко монтироваться и подключаться к другим деталям.
Стоимость и бюджет
Бюджет проекта влияет на выбор типа сервопривода. Сервоприводы с высоким крутящим моментом и точностью стоят дороже. Таким образом, необходимо найти баланс между стоимостью и производительностью.
Сервоприводы, управляемые Arduino, включают в себя:
Сервоприводы, управляемые Arduino, отличаются следующими особенностями:
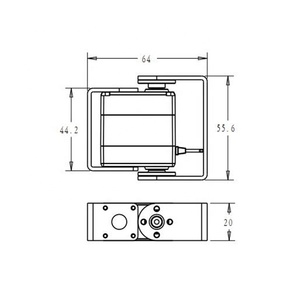
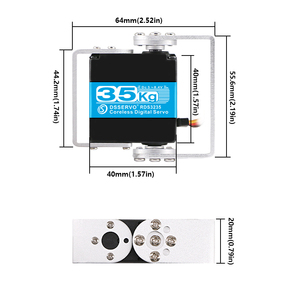
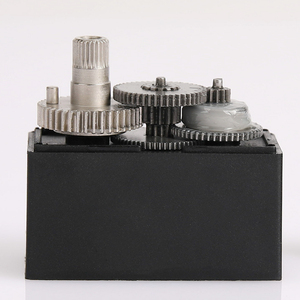
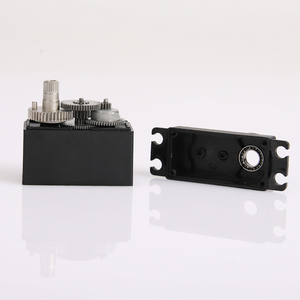
Основная конструкция сервомотора состоит из двигателя, редуктора, потенциометра и схемы управления. Двигатель запускает вращение, а редуктор увеличивает крутящий момент и уменьшает скорость. Потенциометр отвечает за обратную связь по положению, а схема управления обеспечивает точное управление положением сервопривода. Плата Arduino спроектирована для управления сервомотором через простое трехпроводное соединение. Управляющий провод отправляет сигнал ШИМ, а провода питания и заземления обеспечивают питание и обратный путь для тока. Плата Arduino может управлять несколькими сервомоторами с помощью специальной библиотеки.
При использовании сервоприводов для роботов, управляемых Arduino, необходимо соблюдать определенные меры безопасности, чтобы избежать несчастных случаев и повреждений. Вот некоторые распространенные меры предосторожности:
Отключение питания
Всегда отключайте питание сервопривода и всей системы Arduino перед подключением или отключением сервопривода.
Проверка соединений
Убедитесь, что все соединения надежны и правильные, дважды проверив проводку и штекеры перед включением системы.
Правильное напряжение
Убедитесь, что сервоприводы питаются от правильного напряжения.
Защита от перегрузки по току
Используйте устройство ограничения тока, такое как предохранитель или автоматический выключатель, для защиты сервоприводов и Arduino от перегрузки по току.
Надежный монтаж
Надежно закрепите сервопривод и всю систему, чтобы предотвратить их падение или повреждение.
Чистая рабочая зона
Содержите рабочее место в чистоте и порядке, убирая все предметы, которые могут привести к несчастным случаям.
При оценке качества сервоприводов для роботов Arduino, необходимо учитывать несколько ключевых факторов, чтобы убедиться, что они соответствуют требованиям проекта. Вот некоторые важные соображения:
Крутящий момент
Учитывайте номинальный крутящий момент сервопривода, который показывает его способность выдерживать нагрузки. Выберите сервопривод с достаточным крутящим моментом, чтобы предотвратить его остановку.
Скорость
Проверьте номинальную скорость сервопривода, которая определяет, как быстро он может переместиться в заданное положение. Скорость имеет решающее значение для применений, требующих быстрого отклика.
Точность
Обратите внимание на точность и разрешение сервопривода. Сервоприводы с высоким разрешением обеспечивают более точное позиционирование и плавное движение.
Прочность
Прочность сервопривода имеет большое значение, особенно для применений, связанных с высокими нагрузками или частым использованием. Металлические шестерни более долговечны, чем пластиковые.
Механизм обратной связи
Учитывайте тип механизма обратной связи, используемого сервоприводом. Некоторые сервоприводы используют потенциометры, в то время как другие используют энкодеры для более точного определения положения.
Потребление энергии
Оцените потребление энергии сервопривода, поскольку оно влияет на общие энергетические потребности проекта. Более низкое потребление энергии предпочтительнее для устройств, работающих от батарей.
Q. Каковы преимущества Arduino в робототехнике?
A. Сервоприводы, управляемые Arduino, точны и просты в использовании. Пользователи могут запрограммировать их на перемещение в точные позиции многократно без сбоев. Это связано с использованием позиционной обратной связи. Еще одним преимуществом является простота Arduino при построении роботов с сервомоторами. Arduino-платы легко подключать и кодировать с сервомоторами.
Q. Каков срок службы робота, управляемого Arduino?
A. Срок службы робота Arduino высок. Он может прослужить несколько лет при должном обслуживании и уходе. Срок службы робота зависит от различных факторов, таких как материалы, из которых он изготовлен, и среда, в которой он работает. Роботы, изготовленные из прочных материалов, таких как металл и пластик, могут прослужить долго. Роботы, подверженные воздействию суровых условий, таких как экстремальные температуры и вода, с большей вероятностью быстро деградируют.
Q. Как Arduino и сервомоторы используются в робототехнике?
A. Arduino управляет сервомотором с помощью простого кода, загруженного на плату. Код, отправленный на двигатель, говорит ему, на сколько градусов повернуться и с какой скоростью двигаться. Это означает, что пользователь может запрограммировать робота на выполнение различных задач, таких как движение вперед, назад и вбок. Он также может поворачиваться или останавливаться в любой заданной точке. Способность платы Arduino управлять движением двигателя делает ее подходящей для таких применений, как роботизированные руки, автоматизированные машины и дроны.















