
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(375 шт. продукции доступно)

























 Ready to Ship
Ready to Ship



 Ready to Ship
Ready to Ship










 Ready to Ship
Ready to Ship




























 Ready to Ship
Ready to Ship
















































































































Шагающий робот Arduino имеет ноги и использует моторы для движения. Робот может двигаться вперед, назад или менять направление. Он использует микроконтроллер для управления движением и имеет датчики, которые помогают ему ориентироваться. Существуют разные типы шагающих роботов Arduino, в том числе:
Двуногие шагающие роботы
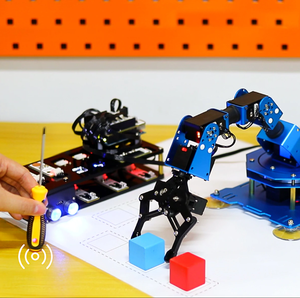
Двуногие шагающие роботы имеют две ноги и двигаются как люди. У них есть суставы в бедрах, коленях и лодыжках. Суставы оснащены сервоприводами, которые позволяют роботу сгибать и двигать ноги. Двуногие роботы могут поднять одну ногу и переместить ее вперед, как человек. Они могут ходить, бегать, пинать мяч или танцевать. Двуногие шагающие роботы создаются с использованием плат Arduino, датчиков и моторов. Плата Arduino контролирует, как робот двигает ногами. Она сообщает моторам и сервоприводам, что нужно делать. Датчики помогают роботу узнать, что находится перед ним. Двуногие роботы используются для обучения детей робототехнике. Они также используются для тестирования новых технологий, которые помогают людям с протезами ног.
Четвероногие шагающие роботы
Четвероногие шагающие роботы имеют четыре ноги, как собаки, кошки и другие животные. Они используют множество сервоприводов для управления каждой ногой. Сервоприводы подключены к ногам робота длинными проводами, называемыми кабелями. Это позволяет роботу двигать ногами различными способами. Четвероногие шагающие роботы могут ползать, бегать или быстро менять направление. Они создаются с использованием небольшого компьютера, называемого микроконтроллером. Микроконтроллер сообщает сервоприводам, как двигать ногами. Он использует датчики, чтобы видеть, что находится вокруг робота. Четвероногие роботы используются, чтобы помочь людям научиться программировать компьютеры и ремонтировать электрические провода.
Шестиногие шагающие роботы
Шестиногие роботы имеют шесть ног. Каждая нога имеет свой собственный мотор, который контролирует ее движение. Шестиногие роботы могут ходить различными способами. Они могут двигаться по кругу или идти назад. Эти роботы создаются с использованием микроконтроллера, который управляет моторами. Он использует датчики, чтобы помочь роботу знать, куда он идет. Шестиногие шагающие роботы используются, чтобы помочь студентам узнать о программировании и как создавать машины.
Цель
Определение цели шагающего робота имеет решающее значение на этапе проектирования и сборки. Требуемые компоненты различаются в зависимости от того, предназначен ли робот для развлечения, образования или исследований. Самые простые роботы, предназначенные для удовольствия, в основном используют платы Arduino, моторы и колеса. Цель этих роботов - развлекаться, играя в игры или выполняя развлекательные действия. Роботы, созданные для обучения, используют датчики и больше деталей, чтобы можно было узнать о технологии и ее работе. Исследовательские роботы создаются, чтобы помочь в получении новой информации, и поэтому могут потребовать сложных деталей и программирования.
Дизайн и тип
При проектировании шагающего робота необходимо сначала определить тип робота, который нужно создать. Это можно сделать, решив, должен ли робот выглядеть как животное, человек или машина. После этого нужно определить форму тела робота и его части. Это включает в себя тип ног, которые будет иметь робот, и материалы, которые будут использоваться для их изготовления.
Компоненты и материалы
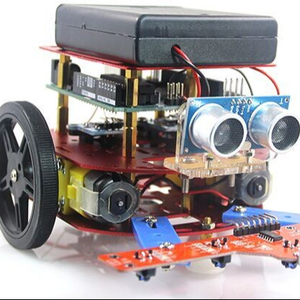
Компоненты и материалы - это то, что заставляет робота двигаться и выполнять различные действия. Некоторые из основных вещей, которые нужны, - это платы Arduino, моторы и колеса. Плата Arduino действует как мозг робота, сообщая ему, что нужно делать. Сервоприводы и электродвигатели - это те, которые заставляют робота двигаться, управляя колесами или ногами. Колеса - это ноги робота, когда вы решаете сделать колесного робота. Другие части, которые могут потребоваться, включают датчики, колеса и различные электронные компоненты. Материалы, используемые для создания тела робота, могут быть пластиком, металлом или деревом, в зависимости от типа робота и его дизайна.
Источник питания
Источник питания - это то, что дает роботу энергию, чтобы он мог работать. Батареи - самый распространенный источник энергии для шагающих роботов, потому что они портативны и удобны в использовании. Тип батарей, которые нужно использовать, зависит от напряжения и того, как долго должен работать робот. Некоторые роботы используют перезаряжаемые батареи, потому что их можно заряжать и использовать снова, когда они разряжаются.
Программирование и управление
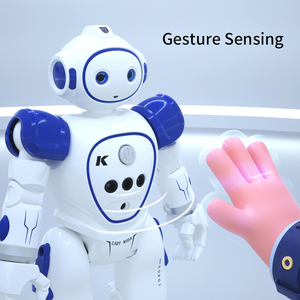
Роботы, созданные для образования, используют датчики и больше деталей, чтобы можно было узнать о технологии и ее работе. Эти роботы могут чувствовать вещи вокруг себя, такие как препятствия или звуки. Датчики передают эту информацию на плату Arduino, которая сообщает роботу, что нужно делать. Программирование важно при создании этих роботов, поскольку оно помогает вам контролировать, что делает робот, и как он реагирует на то, что он чувствует.
Шагающие роботы Arduino - это воплощение современных технологий, сочетающих в себе функциональность, характеристики и инновационный дизайн для создания универсальных платформ для обучения, исследований и творчества. Эти роботы, работающие на микроконтроллерах Arduino, служат различным целям, включая образование, исследования и развлечения. Они предлагают богатый набор функций, позволяющих пользователям программировать их для ходьбы, поворота и выполнения других действий, способствуя практическому обучению робототехнике и программированию.
Их дизайн, характеризующийся модульностью и адаптивностью, позволяет проводить настройку и масштабирование, отвечая потребностям как начинающих, так и опытных энтузиастов. Благодаря возможности интегрировать различные датчики, исполнительные механизмы и компоненты, эти роботы могут быть адаптированы к конкретным приложениям, способствуя решению задач и инновациям. Кроме того, их прочная конструкция наряду с такими функциями, как варианты питания и интерфейсы связи, обеспечивает надежность и долговечность, поддерживая разнообразное использование как в помещении, так и на улице.
Более того, интеграция таких передовых элементов, как машинное обучение и искусственный интеллект, открывает новые возможности для интеллектуального поведения и автоматизации, повышая их полезность в исследованиях и экспериментах. Объединение этих аспектов позиционирует шагающих роботов Arduino в качестве ценного инструмента в сфере образования, способствуя получению практических навыков в области STEM и культивируя дух любопытства и творчества. По мере развития технологий эти роботы обещают дальнейшее развитие, предлагая неограниченные возможности для исследования и инноваций.
В1: Что такое шагающие роботы Arduino?
О1: Шагающие роботы Arduino - это миниатюрные машины, которые используют плату Arduino для управления своими движениями, что позволяет им ходить и выполнять различные задачи.
В2: Каково назначение Arduino в шагающих роботах?
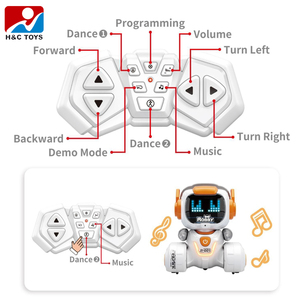
О2: Arduino обеспечивает систему управления для шагающих роботов, позволяя легко программировать и точно управлять датчиками и моторами для плавной ходьбы и выполнения задач.
В3: Можно ли настроить шагающих роботов Arduino?
О3: Да, шагающие роботы Arduino очень настраиваемы по дизайну, функциональности и программированию, чтобы соответствовать конкретным потребностям и предпочтениям пользователя.
В4: Какова образовательная ценность шагающих роботов Arduino?
О4: Шагающие роботы Arduino предлагают практическое обучение робототехнике, программированию и инженерии, делая сложные концепции понятными через практический опыт.
В5: Каковы области применения шагающих роботов Arduino?
О5: Шагающие роботы Arduino имеют разнообразные области применения, включая образование, исследования, развлечения и вспомогательные технологии, адаптируясь к различным задачам и средам.



















