All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(65 шт. продукции доступно)
























 Ready to Ship
Ready to Ship































 Ready to Ship
Ready to Ship















 Ready to Ship
Ready to Ship











 Ready to Ship
Ready to Ship




































































































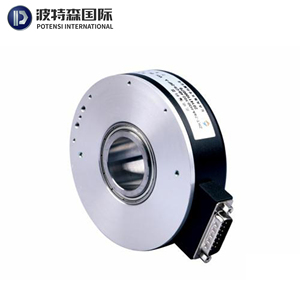
Конструкция цифрового энкодера представляет собой сложную электронную схему, которая создает цифровое представление входного сигнала, такого как его скорость, положение или движение. Разработчики могут создавать различные типы энкодеров в зависимости от их целевого применения. Вот некоторые распространенные типы энкодеров:
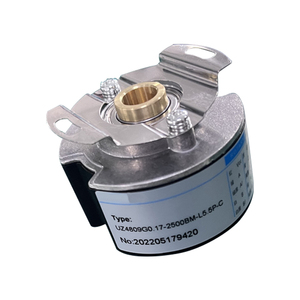
Поворотный
Эти поворотные энкодеры вала измеряют вращение объекта вокруг фиксированной оси. Конструкция поворотных энкодеров будет иметь вращающийся вал, прикрепленный к измеряемому объекту. По мере вращения вала датчики обнаруживают это вращательное движение и кодируют его в цифровой сигнал. Пользователи найдут поворотные энкодеры в приложениях, где требуется угловое положение, скорость и направление вращения, таких как электродвигатели, робототехнические суставы и сервосистемы.
Линейный
Линейные энкодеры измеряют линейное смещение или положение объекта по прямой траектории. Как и их поворотные аналоги, они также имеют движущуюся часть, которая перемещается по заданному пути. По мере движения этой части датчики обнаруживают линейное движение и преобразуют его в цифровой сигнал. Линейные энкодеры полезны для приложений, где требуется точное линейное позиционирование, таких как станки с ЧПУ, конвейерные ленты и промышленные приводы.
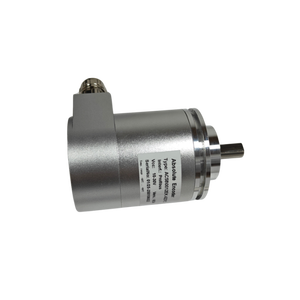
Абсолютный
Абсолютный цифровой энкодер обеспечивает уникальный цифровой выходной код для каждой позиции в своем диапазоне движения. Он делает это с помощью системы кодирования, которая присваивает отдельный код каждой возможной позиции. Это позволяет пользователям знать точное положение измеряемого объекта, даже при отключении питания или сбое системы. Абсолютные энкодеры широко распространены в приложениях, где знание точного положения имеет решающее значение, таких как роботизированные руки,航空航天系统 и автоматизированное оборудование.
Инкрементный
В отличие от абсолютного энкодера, инкрементный энкодер предоставляет информацию о относительном положении. Он делает это путем генерации серии импульсов по мере движения измеряемого объекта. Пользователи затем могут подсчитывать эти импульсы, чтобы определить направление и величину движения. Инкрементные энкодеры обычно используются в приложениях, где требуется подсчет или измерение углового или линейного смещения, таких как спидометры, одометры и системы управления положением.
Существует множество полезных применений для энкодеров в проектах цифровой конструкции энкодеров. К ним относятся широкий промышленный сектор, медицинское оборудование, аэрокосмическая отрасль, транспорт, робототехника, автомобилестроение и многое другое.
Функции:
Цифровые энкодеры выполняют множество важных функций. Они усиливают сигналы, модулируют их, а также помогают в управлении и управлении. Они повышают точность измерения углов и скоростей, тем самым помогая обеспечить точное измерение и управление во многих различных приложениях.
Проект конструкции цифрового энкодера:
Этот проект предоставит полезную информацию о том, как работают цифровые энкодеры, какие у них есть приложения, типы доступных энкодеров и преимущества использования этих систем. Он также даст некоторое представление о системе цифровой конструкции энкодера и ее работе.
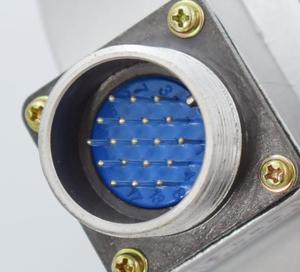
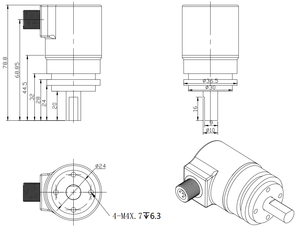
Общая конструкция энкодера:
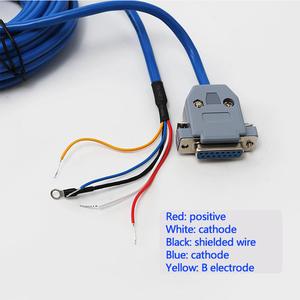
Общая конструкция энкодера состоит из нескольких компонентов, в том числе чувствительного элемента, который отвечает за измерение угла поворота. Существует также преобразователь, который преобразует аналоговый выходной сигнал в цифровой. Кроме того, существует выходной сигнал, который обеспечивает закодированный сигнал, и для правильной работы энкодера требуется источник питания. Эти энкодеры также имеют контроллеры для регулирования и управления выходным сигналом.
Работа энкодера:
Чтобы энкодер работал должным образом, входной сигнал (который может быть угловым, линейным и т. д.) необходимо преобразовать в цифровой выходной сигнал. Этот цифровой выход затем можно использовать в таких приложениях, как измерение скорости, управление двигателем, обратная связь по положению и т. д. Энкодеры могут обеспечить точное управление и помочь в плавной работе механических систем.
Потребительская электроника:
Цифровые энкодеры можно найти в различных потребительских электронных устройствах, таких как видеомагнитофоны, цифровые камеры, видеоигры и аудиооборудование, среди прочего. Они помогают преобразовывать сигналы в цифровые форматы, которые можно хранить и обрабатывать, улучшая общую производительность устройства.
Вещание и производство мультимедиа:
Отрасли вещания и производства мультимедиа используют эти энкодеры для сжатия и преобразования мультимедийных сигналов/аудио в цифровые форматы для передачи и создания. Системы цифровых энкодеров позволяют передавать звук и видео в виде цифровых сигналов.
Телекоммуникации:
В области телекоммуникаций сетевые устройства, такие как коммутаторы и маршрутизаторы, используют цифровые энкодеры для преобразования электрических сигналов в цифровые форматы. Это помогает в обработке сигналов, обнаружении и передаче голоса или данных с минимальными искажениями.
Промышленная автоматизация:
В промышленности машины могут быть оснащены цифровыми энкодерами для точного измерения и управления вращательным или линейным движением. Эта функция имеет решающее значение для повышения производительности и поддержания современных заводов или производственных процессов.
Аэрокосмическая и оборонная отрасли:
Аэрокосмическая и оборонная отрасли внедряют цифровые энкодеры в различные приложения, такие как: оборудование связи, навигационные системы и датчики для преобразования данных или сигналов и повышения операционной эффективности. Системы управления полетом также используют энкодеры для определения положения управляющих поверхностей для точного маневрирования.
Медицинская визуализация:
Медицинское оборудование для визуализации, такое как ультразвуковые аппараты, МРТ или КТ-сканеры, использует цифровые энкодеры для преобразования аналоговых сигналов в цифровые форматы для точной визуализации и диагностики. Эти цифровые энкодеры также могут улучшить мобильность медицинских устройств.
Автомобильные приложения:
Цифровые энкодеры используются в автомобильной промышленности для управления и мониторинга различных функций, таких как тестирование двигателей, электромобили и робототехнические приложения. Они помогают определить положение, скорость и направление движения деталей в автомобиле.
При выборе конструкции для энкодера в цифровых приложениях необходимо учитывать несколько важных факторов, чтобы обеспечить оптимальную производительность, надежность и пригодность для предполагаемого применения. Ниже приведены некоторые факторы, которые следует учитывать:
В1: Насколько важно напряжение питания в конструкции цифрового энкодера?
A1: Напряжение питания является фундаментальным требованием конструкции для цифровых энкодеров. Оно защищает от напряжений, которые могут повредить энкодер. Кроме того, оно обеспечивает бесперебойную работу энкодера, так как слишком низкое напряжение может помешать его правильной работе.
В2: Какую роль играет тип вывода в выборе цифровых энкодеров?
A2: Тип вывода является важным фактором при выборе цифровых энкодеров, поскольку он определяет, находится ли выход энкодера в формате, совместимом с входом системы.
В3: Как разрешение влияет на выбор энкодера?
A3: Разрешение напрямую связано с точностью определения положения вала, отсюда его важность в конструкции цифрового энкодера. Это решающий фактор при выборе и применении энкодера.
В4: Какие потенциальные варианты использования для энкодеров с более низким разрешением?
A4: Приложения, где разрешение энкодера не имеет решающего значения, например, конвейерные ленты или вентиляторы низкой скорости, являются потенциальными вариантами использования для энкодеров с более низким разрешением.