
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(1883 шт. продукции доступно)




















































































































































 Ready to Ship
Ready to Ship




 Ready to Ship
Ready to Ship











































Говоря о роботах малого размера, важно понимать, что этот термин относится к коллаборативным роботам или коботам. Эти мини-роботы созданы для совместной работы с людьми. Они имеют небольшие размеры, чтобы работать в ограниченных пространствах и выполнять задачи, требующие точности. Благодаря компактным размерам их легко перемещать с одного рабочего места на другое и перепрограммировать для выполнения различных задач. Роботы малого размера классифицируются на следующие типы:
Роботы малого размера находят широкое применение в различных областях благодаря своим компактным размерам и гибкости. Вот некоторые распространенные сценарии использования:
Производство
Роботы малого размера могут выполнять сборочные работы, перемещать материалы и упаковывать продукцию. Они хорошо подходят для задач, требующих точности и скорости, например, для сборки мелких деталей или упаковки товаров для отправки.
Электронная промышленность
Эти роботы могут использоваться для сборки печатных плат, установки компонентов и пайки соединений. Их небольшие размеры и ловкость делают их идеальными для работы с хрупкими электронными деталями, не повреждая их.
Сельское хозяйство
Роботы малого размера могут использоваться для таких задач, как посев семян, полив растений и сбор урожая. Они могут легко перемещаться по полям или теплицам и выполнять эти задачи более эффективно, чем традиционные методы.
Логистика и складирование
Эти роботы могут перемещаться по складам для извлечения и транспортировки товаров. Их можно запрограммировать на следование по определенным маршрутам или использовать датчики для навигации и избежания препятствий, повышая эффективность складских операций.
Медицинская сфера
Роботы малого размера могут оказывать помощь во время операций, удерживая инструменты или совершая точные движения. Их также можно использовать для транспортировки медицинских материалов по больницам или введения лекарств пациентам.
Исследования и разработки
Эти роботы могут использоваться для проведения экспериментов и испытаний, обеспечивая точные и согласованные результаты. Их также можно запрограммировать на выполнение задач, которые были бы трудными или опасными для человека, что позволяет исследователям изучать различные явления.
Уборка и техническое обслуживание
Роботы малого размера могут убирать полы, окна и другие поверхности в коммерческих и жилых помещениях. Они также могут выполнять задачи по техническому обслуживанию, такие как замена лампочек или проверка оборудования, без вмешательства человека.
Развлекательная индустрия
Эти роботы могут использоваться для создания световых шоу, исполнения танцев или участия в других мероприятиях, развлекающих публику. Их запрограммированные движения и точность делают их отличными артистами.
При покупке роботов малого размера для перепродажи владельцы бизнеса должны учитывать сферы применения, типы, функции, грузоподъемность и простоту программирования. Это связано с тем, что эти факторы гарантируют точность и четкость движений робота, что имеет решающее значение для таких задач, как сборка, упаковка или проверка.
Основное назначение робота определяет, какой тип робота малого размера следует приобрести. Поэтому владельцы бизнеса должны оценить отрасли и задачи, которые требуют автоматизации. Например, если клиентам нужен робот для обслуживания станков, им понадобится робот с захватом, способным обрабатывать предметы разных форм и размеров. Если клиентам нужен робот для упаковки, владельцы бизнеса должны приобрести робота с присоской, которая может эффективно упаковывать продукцию.
Роботы малого размера бывают разных типов, например, декартовы, SCARA и членистые. Владельцы бизнеса должны понимать различия между этими типами, чтобы предоставлять своим клиентам необходимые варианты. Например, членистый робот более гибкий, чем декартовый, который более жесткий. Поэтому он может выполнять более сложные задачи.
Такие функции, как оси движения, радиус действия, скорость, грузоподъемность и точность, важны при выборе робота малого размера. Владельцы бизнеса должны убедиться, что роботы оснащены необходимыми функциями для эффективной работы и лучшей производительности. Чем больше осей у робота, тем он более гибкий. Аналогичным образом, если робот имеет больший радиус действия и скорость, он может выполнять задачи, требующие быстрого и эффективного перемещения на большие расстояния. Точность робота измеряется в миллиметрах, и более точный робот обеспечивает лучшие результаты.
Роботы имеют грузоподъемность, то есть вес предмета, который они могут поднять. Владельцы бизнеса должны приобретать роботов с большей грузоподъемностью для обработки более тяжелых предметов. Однако они также могут приобрести роботов с меньшей грузоподъемностью, если их целевые клиенты ищут робота, способного поднимать небольшие и легкие предметы.
Некоторые клиенты могут захотеть приобрести робота, который они могут легко запрограммировать для выполнения разных задач. Поэтому владельцы бизнеса должны искать роботов малого размера с удобными в использовании программными интерфейсами.
Роботы малого размера поставляются с разными конструкциями, которые оптимизированы для их предполагаемых функций и применений. Вот некоторые функции, характеристики и элементы конструкции роботов малого размера.
Функции
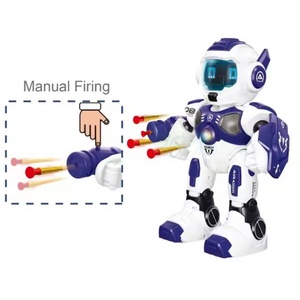
Роботы малого размера спроектированы для выполнения определенных функций в зависимости от их применения. Например, их можно использовать для таких задач, как уборка, где робот-пылесос имеет всасывающие механизмы и щетки для удаления грязи и мусора. В производстве небольшие коллаборативные роботы, или коботы, используются для сборки, подъема и размещения, а также контроля качества. Роботы-доставщики предназначены для автономной транспортировки и доставки товаров.
Характеристики
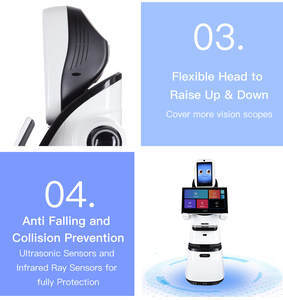
К ключевым характеристикам роботов малого размера относятся следующие: во-первых, мобильность, которая позволяет им перемещаться по своей среде с помощью колес, ног или гусениц. Большинство из них оснащены навигационными системами, которые позволяют им перемещаться и избегать препятствий. Эти навигационные системы используют датчики и камеры для картографирования и локализации. Кроме того, роботы имеют манипуляционные инструменты, которые включают в себя руки, захваты и другие инструменты, которые используются для взаимодействия с объектами и выполнения задач. Более того, они оснащены программируемыми системами управления, которые позволяют пользователям программировать и контролировать их работу.
Кроме того, они оснащены механизмами безопасности, которые гарантируют безопасную работу рядом с людьми и другими объектами. Например, они имеют аварийные кнопки остановки, системы обнаружения препятствий и предотвращения столкновений.
Конструкция
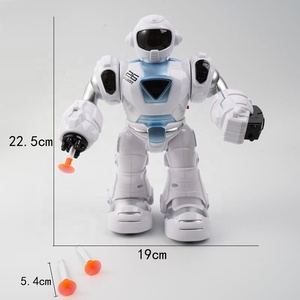
Роботы малого размера спроектированы с учетом функциональности, эффективности и эстетической привлекательности. Их конструкции включают в себя следующее: во-первых, роботы имеют компактную и эргономичную конструкцию, которая позволяет им работать в ограниченных пространствах и обеспечивает удобство использования и хранения. Кроме того, они изготовлены из легких материалов, таких как пластик, алюминий и углеродные волокна, чтобы уменьшить вес, сохраняя при этом прочность. В дополнение к этому, роботы оснащены встроенными датчиками, камерами и навигационными системами для автономной работы и дистанционного управления.
Q1: Как управлять роботом малого размера?
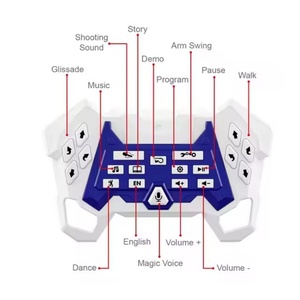
A1: Большинство роботов малого размера имеют интуитивно понятную систему управления. Система управления осуществляется с помощью пульта дистанционного управления, приложения для смартфона или компьютерного интерфейса. Управление простое, что делает работу с роботами бесперебойной.
Q2: Может ли человек запрограммировать робота малого размера?
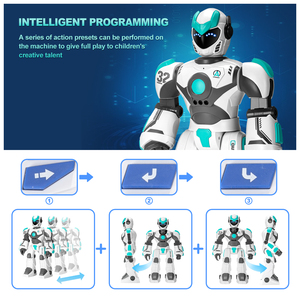
A2: Некоторые роботы малого размера имеют программируемые функции. Они поставляются с предустановленными задачами, которые можно изменять. Пользователи с техническими знаниями также могут писать код, используя совместимые языки программирования.
Q3: Безопасны ли роботы малого размера?
A3: Роботы малого размера безопасны. Они изготавливаются с функциями безопасности, такими как аварийные кнопки остановки, датчики обнаружения столкновений и запрограммированные протоколы безопасности. Эти функции гарантируют безопасность пользователей и робота во время работы.
Q4: Какие требования к техническому обслуживанию предъявляются к роботам малого размера?
A4: Техническое обслуживание роботов малого размера простое и включает в себя регулярные проверки. Пользователи должны регулярно проверять и обновлять программное обеспечение. Также следует осматривать робота на наличие физических повреждений и убедиться, что все его части находятся в исправном состоянии.



















