
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(383 шт. продукции доступно)

 Ready to Ship
Ready to Ship











 Ready to Ship
Ready to Ship





























 Ready to Ship
Ready to Ship











































 Ready to Ship
Ready to Ship

















 Ready to Ship
Ready to Ship










 Ready to Ship
Ready to Ship






















































Робот для решения лабиринтов – это особый тип робота, разработанный для поиска самого быстрого пути выхода из лабиринта. Этот робот использует различные датчики для обнаружения стен, применяя при этом различные алгоритмы, чтобы успешно ориентироваться в лабиринте. В зависимости от конструкции и функций робота, существуют разные типы роботов для решения лабиринтов.
Микромышь:
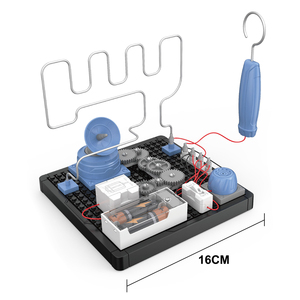
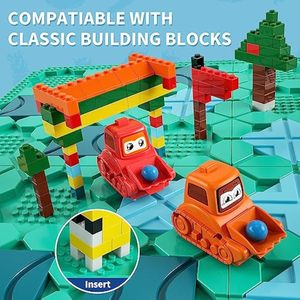
При работе с лабиринтами небольшого размера микромышь является идеальным решением. Этот робот с микропроцессорным управлением разработан для навигации по маленьким лабиринтам. По всему миру проводятся многочисленные соревнования, чтобы побудить студентов и инженеров создавать более совершенных роботов-микромышей. Как правило, лабиринт имеет сетчатую структуру, и робот находит свой путь с помощью различных датчиков. Для успешной навигации лабиринт должен быть не менее 16 см, а робот не более 28 мм.
Роботы для следования по линии:
Эти роботы предназначены для решения простых лабиринтов. Они следуют по помеченному пути, чтобы успешно ориентироваться в лабиринте. Путь может быть в виде линии или тропы, и он отмечен черным цветом на более светлом фоне. Робот использует инфракрасные или световые датчики для обнаружения линии и удержания ее на курсе. Роботы для следования по линии являются популярным выбором для начинающих, так как они предоставляют хорошую отправную точку в концепциях следования по линии и робототехники.
Роботы для следования по стенам:
Этот тип робота специально разработан для решения любого лабиринта для роботов, который имеет стены. Робот использует свои датчики для обнаружения стен лабиринта и впоследствии ориентируется в лабиринте, придерживаясь одной стены. Самый простой робот для следования по стенам использует базовые компоненты, такие как два колеса, датчики стен и моторы. Хотя роботы для следования по стенам не являются самыми быстрыми, они представляют собой отличный способ вырваться из лабиринта.
Акустические или звуковые роботы:
В отличие от других роботов для решения лабиринтов, звуковой робот может работать только в лабиринте без визуальных препятствий. Этот тип робота генерирует звуковые волны, которые могут быть в виде ультразвуковых или звуковых волн. После создания звуковых волн датчик робота обнаруживает отражение. В зависимости от формы лабиринта робот будет успешно ориентироваться, анализируя отраженные звуковые волны. Акустические роботы – это отличный способ для человека понять, как роботы могут ориентироваться с помощью звуковых волн.
Роботы-рои:
Эти роботы работают по принципу коллективного поведения. Они состоят из множества маленьких роботов, которые работают вместе для решения лабиринта. Каждый робот оснащен датчиками стен, и по мере того, как они перемещаются по лабиринту, они общаются друг с другом, чтобы успешно выйти из лабиринта. Роботы-рои являются горячей темой в исследованиях роботов, решающих лабиринты, поскольку они имитируют коллективное поведение, встречающееся в природе.
Робот для решения лабиринтов имеет множество функций
Робот для решения лабиринтов имеет ряд особенностей
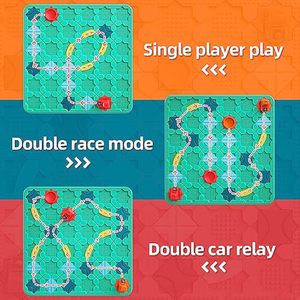
Применение роботов для решения лабиринтов многочисленно и охватывает как образовательные и рекреационные сферы, так и коммерческие и промышленные приложения. Вот некоторые ключевые области применения робота для решения лабиринтов:
При выборе робота для решения лабиринтов для покупки необходимо учесть несколько важных моментов. Перед покупкой важно понять область применения или промышленное назначение. Это может быть для образовательных целей, хобби, соревнований или промышленных приложений. Область применения поможет определить необходимые функции в зависимости от использования робота. Если это коммерческое использование, необходимо учитывать целевую аудиторию.
Еще один важный фактор, который необходимо учитывать, – это тип лабиринта, который решает робот. Это лабиринт в помещении или на улице? Знание среды, в которой будет работать робот, очень важно. Роботы, предназначенные для работы в условиях открытой местности, более прочные и обладают водонепроницаемыми свойствами. Однако роботы, предназначенные для лабиринтов в помещении, более легкие и работают с точной маневренностью. Кроме того, тип лабиринта и его сложность определяют, насколько быстрым и маневренным является робот, среди других функций.
Следующим шагом является исследование, анализ и сравнение различных поставщиков и их продукции. Выбирайте надежных поставщиков и помните, что не все роботы созданы равными. Ищите такие черты, как прочная конструкция, точные датчики и надежные системы навигации. Оцените скорость робота, маневренность и способности к решению лабиринтов, чтобы убедиться, что он соответствует необходимым стандартам. Проанализируйте технические характеристики различных вариантов, такие как время автономной работы, диапазон действий и максимальная скорость.
Прежде чем выбрать робота для решения лабиринтов для покупки, необходимо соотнести его стоимость с его ценностью. При оценке цены необходимо учитывать качество робота, долговечность и функции. Обязательно читайте отзывы пользователей и обратную связь, чтобы получить представление о реальной производительности и опыте работы с роботом. Отзывы помогают проверить заявления поставщика. Они предоставляют подробную информацию об обслуживании клиентов и продукции поставщика. Обратная связь и отзывы являются неотъемлемой частью выбора поставщика. Кроме того, не стесняйтесь задавать вопросы и уточнять все, что вам непонятно. Добросовестные поставщики, которые хотят сохранить свой статус, будут оперативно отвечать на запросы.
Наконец, обязательно учитывайте послепродажное обслуживание поставщика. К ним относятся гарантийные политики, техническое обслуживание и ремонтные услуги. Выбор робота с гарантией обеспечивает спокойствие в случае неисправностей. Планируйте долгосрочное использование робота, изучив любые необходимые процедуры обслуживания или эксплуатации. Предскажите любые дополнительные расходы, связанные с использованием робота, например, стоимость запасных частей или обновления.
Вопрос 1: Какова функция микроконтроллера в роботе для решения лабиринтов?
Ответ 1: Микроконтроллер – это мозг робота для решения лабиринтов. Он выполняет алгоритм, обрабатывает данные датчиков и управляет моторами для навигации по лабиринту.
Вопрос 2: Какие датчики обычно используются в роботах для решения лабиринтов?
Ответ 2: Инфракрасные (ИК) и ультразвуковые датчики используются чаще всего. Они помогают обнаруживать стены, препятствия и определять положение робота в лабиринте.
Вопрос 3: Как робот составляет карту лабиринта, чтобы решить его?
Ответ 3: Робот строит карту, используя свои датчики для обнаружения стен и препятствий. Он отслеживает свое положение и планировку лабиринта, что помогает найти выход.
Вопрос 4: Какие языки программирования часто используются для программирования роботов для решения лабиринтов?
Ответ 4: C и Python используются чаще всего, поскольку они универсальны и подходят для программирования логики робота и алгоритмов.
Вопрос 5: Как робот обновляет свой путь во время решения лабиринта?
Ответ 5: Робот использует обратную связь от своих датчиков в реальном времени, чтобы постоянно обновлять свое положение и корректировать свой путь, если встречаются препятствия или меняется путь.



















